Execution Is Not Governed by Speed or Iteration
Agile Manufacturing vs Lean is often presented as a comparison of methods, but the real distinction is whether execution is governed. Agile Manufacturing is positioned as the next evolution of industrial performance, emphasizing rapid iteration, flexibility, bottom-up innovation, and responsiveness to change. Lean (post-1988) is positioned alongside it as a complementary system focused on waste reduction and continuous improvement. When combined, these approaches are said to deliver productivity, Quality, and resilience across a wide range of industrial environments.
This framing does not define how execution is controlled.
Agile Manufacturing and Lean (post-1988) share the same structural condition. Both rely on improvement activity, iteration, and adaptation while leaving the conditions of execution undefined. As a result, the system is expected to improve through activity rather than operate within enforced constraint.
Without defined conditions and enforced response, execution is not governed. Work proceeds based on interpretation, local adjustment, and individual effort rather than system control. Variation is introduced during execution, not prevented at its source, and responsibility for maintaining performance shifts from the system to the operator.
This shift changes the role of improvement. Improvement activity expands to compensate for the absence of control. Iteration replaces enforcement, and feedback replaces prevention. The system is no longer designed to maintain stable conditions. It is expected to correct itself after variation has already entered execution.
The result is predictable. Activity increases. Speed increases. Variation increases. As variation increases, the reliability of output decreases, and Quality becomes conditional on detection and correction rather than enforced by design. Performance is no longer governed by defined conditions but managed through response to outcomes.
The Toyota Production System does not operate under these conditions. It governs execution by defining and enforcing the conditions under which work is performed. Control is established before improvement occurs, and behavior is constrained by system design rather than adjusted through iteration. This distinction defines the boundary between governed and ungoverned systems and establishes the basis for the analysis that follows.
Agile (1980s): What Was Observed and What Was Transferred
Agile did not originate in manufacturing, nor did it emerge from the Toyota Production System as a governed operating system. Its roots can be traced to observations made in the 1980s of Japanese product development practices, where researchers examined how companies such as Toyota, Honda, and Fuji organized work to achieve speed, coordination, and responsiveness in complex development environments.
These observations were formalized in product development research that described cross-functional, overlapping development structures in Japanese firms. Product development was conducted by cross-functional teams rather than sequential functional handoffs. Work phases overlapped instead of progressing through rigid, linear stages. Information flowed continuously across disciplines, and decisions were made within the team rather than escalated through hierarchical structures. The emphasis was on coordination, adaptability, and rapid learning within the development process.
These observations were specific to product development environments, not production systems governed at the point of execution.
This pattern was described as a “rugby-style” approach to development, where the team advanced as a unit rather than passing work from one function to the next. The speed achieved in these environments was not attributed to isolated tools or techniques, but to the integration of communication, shared responsibility, and continuous adjustment within the development cycle.
These observations were later interpreted and translated into what became Agile principles. The focus shifted toward iteration, incremental delivery, responsiveness to change, and team-based execution. Frameworks such as Scrum formalized these ideas into structured cycles of planning, execution, review, and adjustment. The underlying assumption was that performance could be improved through repeated cycles of execution and feedback.
What was transferred was the visible behavior of fast-moving teams operating in coordinated environments. What was not transferred were the governing conditions that made that behavior stable. The original environments in which these practices were observed operated within disciplined systems that defined roles, constrained execution, and enforced accountability. The behavior was not independent of the system. It was enabled by it.
When these behaviors were abstracted into portable methods, the constraints that governed execution were not carried forward. Iteration, collaboration, and adaptability were preserved, but the conditions that defined normal, enforced interruption, and required response were not. The result was a set of practices that describe how teams can work, but not how execution is controlled.
This distinction is critical. Agile did not remove governance from the Toyota Production System. It emerged from observations of coordinated behavior and translated those observations into principles and frameworks without incorporating the system-level constraints that governed execution. As a result, Agile operates on behavior without enforcing the conditions that make that behavior reliable.
The Misalignment Between Lean (post-1988) and the Toyota Production System
Lean (post-1988) presents the Toyota Production System as a foundation, but it does so by extracting selected elements such as waste reduction, continuous improvement, and standard procedures and repackaging them into a portable framework. This translation makes the system easier to apply across different contexts, but in doing so it removes the conditions that governed the original system. What remains are recognizable practices without the constraints that made them function as an integrated whole.
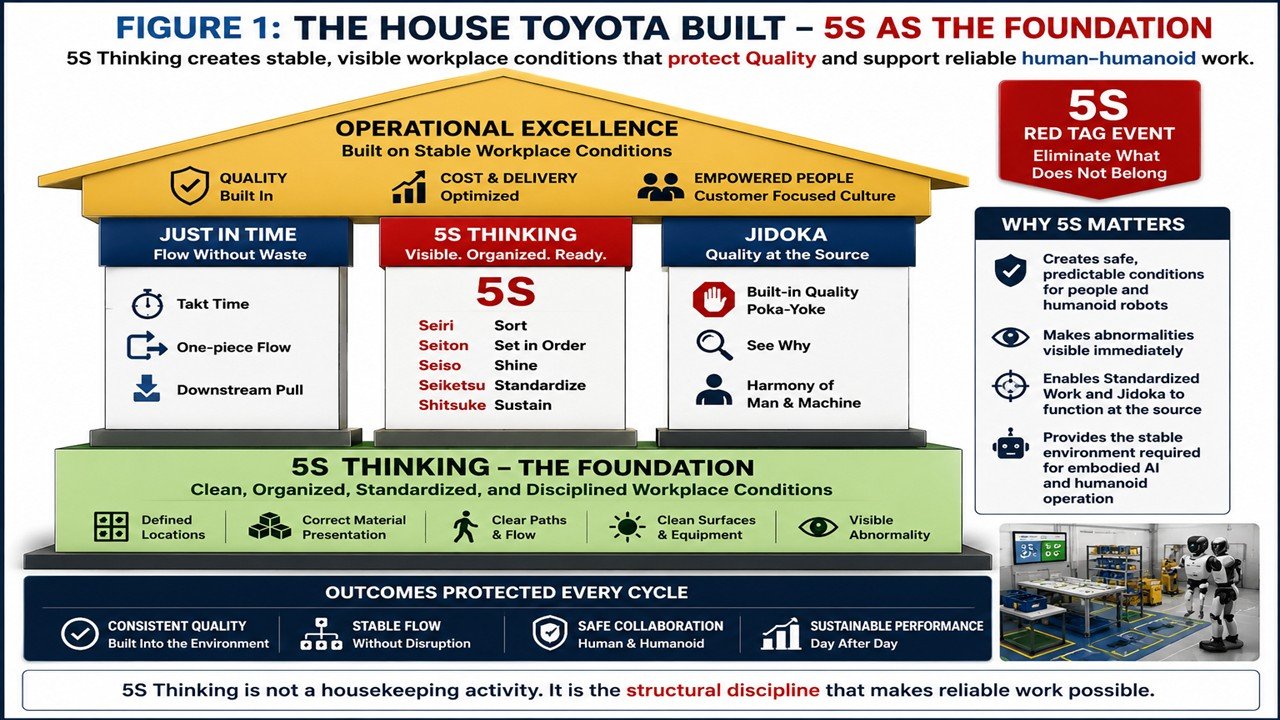
The Toyota Production System was not designed as a collection of practices. It was designed as an operating system that governs behavior through enforced conditions. Standardized Work defines the only acceptable method, sequence, timing, and expected outcome for each activity. Jidoka enforces interruption when those conditions are violated, preventing continuation under abnormal conditions. Leadership response is not discretionary within this structure. It is required by the system and triggered by the occurrence of abnormality.
When these governing conditions are removed or softened, the system does not degrade gradually. It loses its ability to control execution. Work continues under variation, and problems are addressed after they propagate rather than at the point of occurrence. Execution is no longer governed by enforced conditions but by interpretation, allowing individuals and teams to determine how work is performed in the absence of constraint.
Lean (post-1988) formalizes this shift. It allows variation in how work is performed, how problems are handled, and how decisions are made, while relying on continuous improvement activity to manage the consequences. Improvement expands as a compensating mechanism for the absence of control, shifting the system toward correction rather than prevention. The system becomes dependent on identifying and addressing outcomes rather than governing the conditions that produce them.
This is the first structural break from the Toyota Production System. The removal of governing conditions does not eliminate system behavior. It allows variation to enter execution without constraint and establishes the conditions that Agile Manufacturing later accelerates.
Agile Manufacturing Extends the Same Structural Gap
Agile Manufacturing does not originate as a correction to the structural break introduced by Lean (post-1988). It inherits that condition and extends it through speed, iteration, and responsiveness. The governing constraints removed from the Toyota Production System are not restored. Instead, execution is reorganized around cycles of activity rather than controlled conditions.
Its core mechanisms include rapid iteration, incremental delivery, feedback-driven adjustment, and decentralized problem solving. Work is organized into repeated cycles in which execution is completed, evaluated, and then adjusted in subsequent iterations. Performance is expected to improve through repetition rather than through the enforcement of defined conditions.
This structure depends on a specific assumption. It assumes that error introduced during execution can be identified and corrected through subsequent cycles. In software environments, where outputs are reversible and defects can be removed without lasting consequence, this assumption holds. In manufacturing environments, where outputs are physical, this condition does not exist. Once defects are created, they persist as scrap, rework, delay, or customer impact.
As a result, iteration does not eliminate error in manufacturing systems. It responds to error after it has already been introduced. Each cycle allows variation to enter during execution and relies on later evaluation to detect and manage it. Because execution remain undefined, there is no mechanism to prevent continuation under abnormal conditions and no constraint to stop variation at its source. Variation is not only introduced but carried forward across cycles without constraint.
Agile Manufacturing therefore does not introduce control. It reorganizes the system around responsiveness to variation rather than prevention of it. The effect is not increased flexibility within stable conditions, but increasing instability managed through successive cycles of adjustment. Speed does not resolve this condition. It amplifies it by increasing the frequency at which variation is introduced and propagated.
The Absence of Defined Conditions
Neither Lean (post-1988) nor Agile Manufacturing defines the conditions required to control execution. Both rely on improvement activity and adaptation, yet neither establishes a fixed definition of normal, enforces interruption when abnormality occurs, or requires a response tied to system behavior. The conditions that govern how work must be performed are left undefined, and execution is allowed to proceed without constraint.
Without these conditions, execution becomes variable. Work is no longer performed against a single defined method, and there is no mechanism to prevent continuation when that method is violated. As a result, operators adjust to maintain output, local decisions override system design, and work continues under abnormal conditions. Problems are not contained at the point of occurrence. They move through the system and are addressed only after they have propagated.
In this structure, Quality is no longer governed by the conditions under which work is performed. It becomes an outcome evaluated after execution rather than enforced during it. This shifts the system from prevention to correction and introduces a delay between defect creation and intervention, allowing variation to accumulate before it is addressed.
This is not a difference in philosophy. It is the absence of system design required to control behavior. When governing conditions are not defined and enforced, the system does not stabilize. It adapts to variation, incorporates it into normal operation, and reproduces that variation in subsequent cycles.
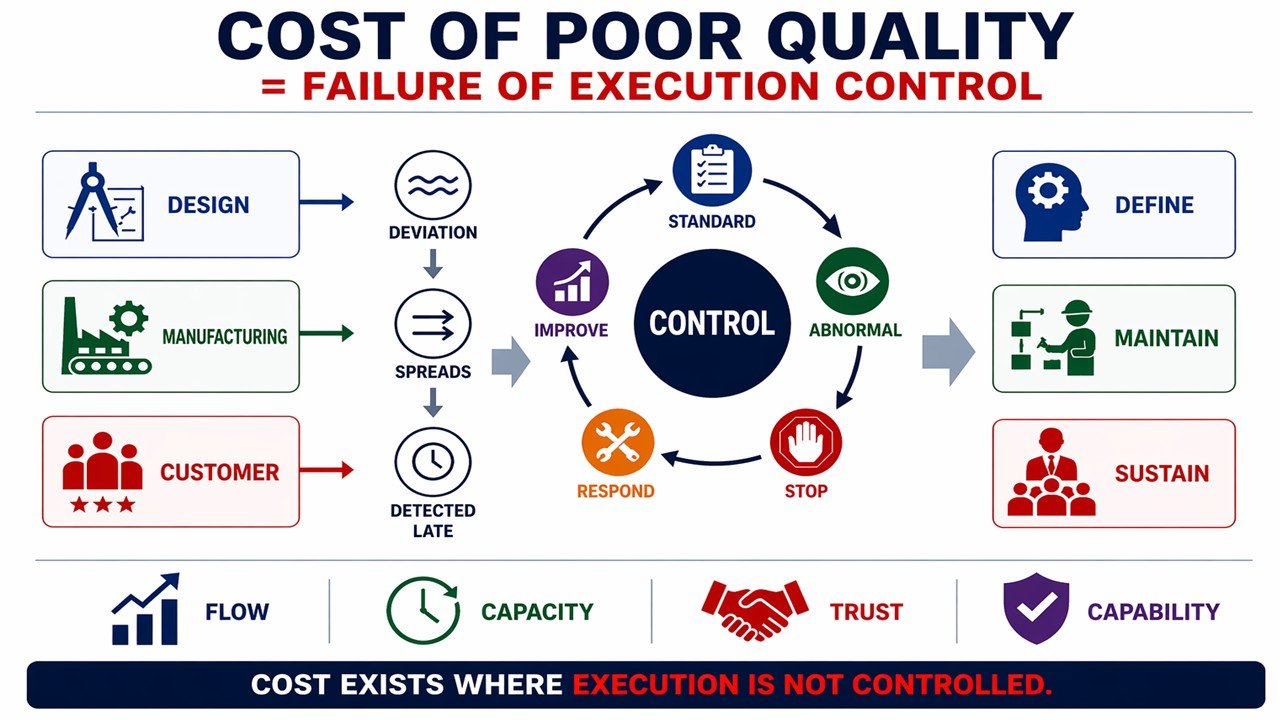
Checkpoints Do Not Replace Control
Agile frameworks often include review stages, retrospectives, and quality checks, and these are presented as mechanisms to ensure performance. In practice, they do not control execution.
A checkpoint evaluates work after it has been performed. It does not prevent the conditions that produce defects. By the time work reaches a review stage, variation has already been introduced, and the system is limited to detecting and correcting outcomes rather than preventing them.
Inspection can identify failure, but it cannot control how work is executed. When Quality is positioned as a checkpoint, it becomes dependent on detection after the fact. This introduces a structural delay between defect creation and intervention, allowing variation to accumulate across cycles before it is addressed.
This delay alters system behavior. Defects are not prevented at the point of occurrence. They are allowed to enter execution, persist through the system, and be managed after they are observed. Control is replaced by evaluation, and execution proceeds without constraint until failure is detected.
The Toyota Production System does not rely on checkpoints to protect Quality. It defines and enforces the conditions under which work is performed so that defects are not produced in the first place.
The Toyota Production System: Control Before Improvement
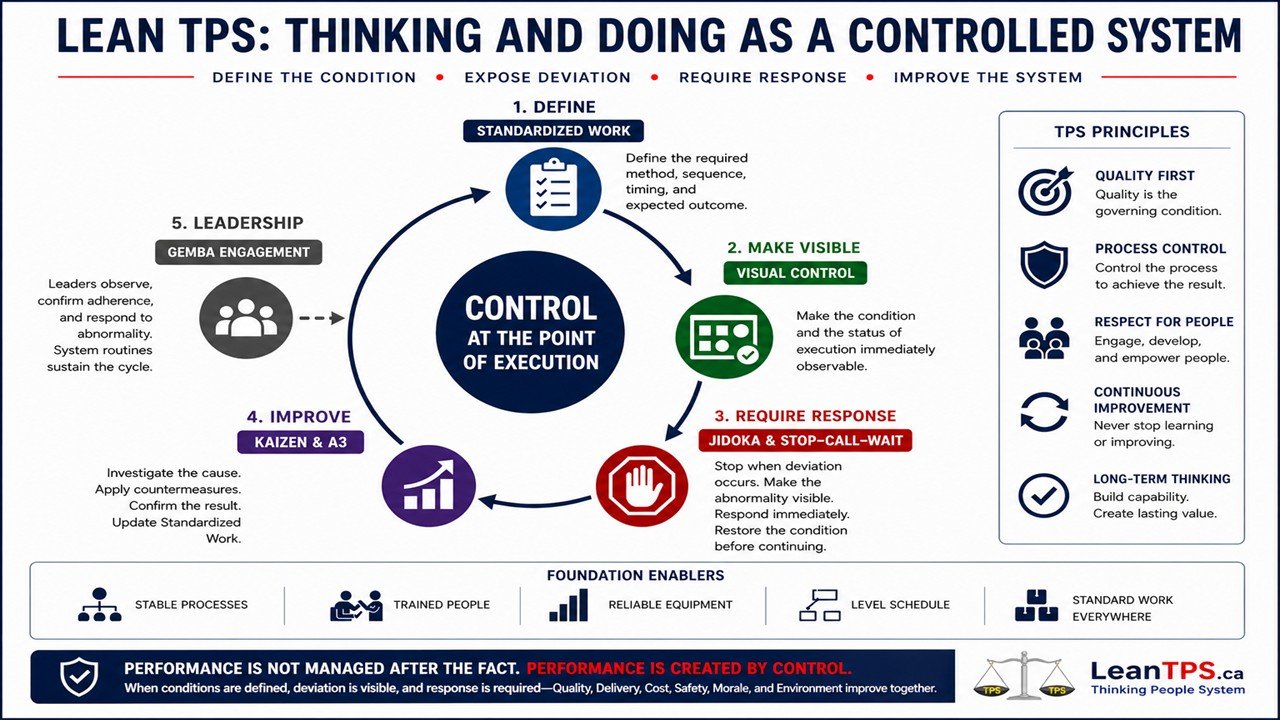
The Toyota Production System establishes control before improvement is allowed. It does not rely on iteration to stabilize performance. It defines and enforces the conditions under which work must be performed so that execution remains consistent and predictable.
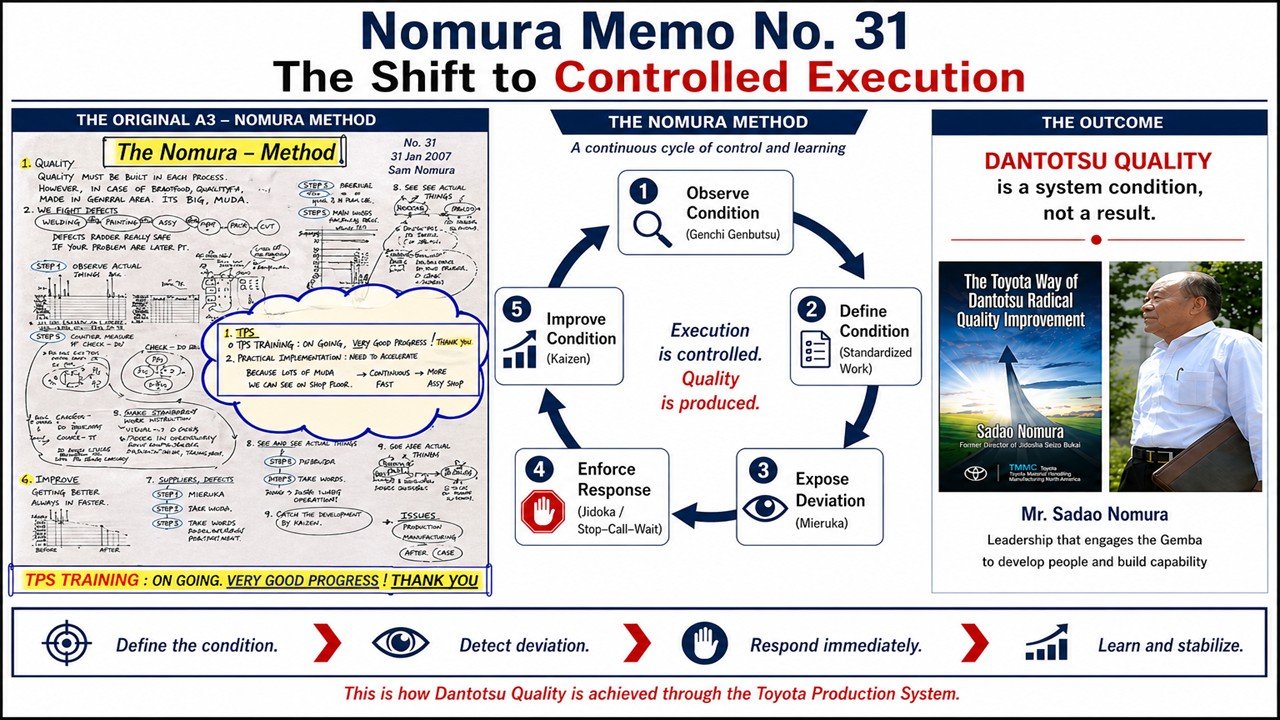
Standardized Work defines the normal condition of execution by specifying the method, sequence, timing, and expected outcome. Jidoka enforces interruption when that condition is violated, preventing continuation under abnormal conditions. Andon makes the abnormality visible and triggers an immediate response, ensuring that deviation is addressed at the point of occurrence.
Leadership is not optional within this structure. It is structurally obligated to act when conditions break down. This ensures that problems are exposed immediately, execution is stopped before defects propagate, and correction takes place at the source. Standards are then revised to prevent recurrence.
This sequence establishes control at the point of work. It creates a closed control loop in which deviation is detected, contained, corrected, and prevented before continuation. The system does not rely on detection after execution. It prevents deviation from being carried forward. Variation is not managed after it occurs. It is prevented by enforcing the conditions under which work is performed. Execution is constrained by design rather than adjusted through feedback.
Improvement within the Toyota Production System is not driven by iteration. It is driven by controlled learning within defined and enforced conditions, where each change is made against a stable baseline and verified before continuation.
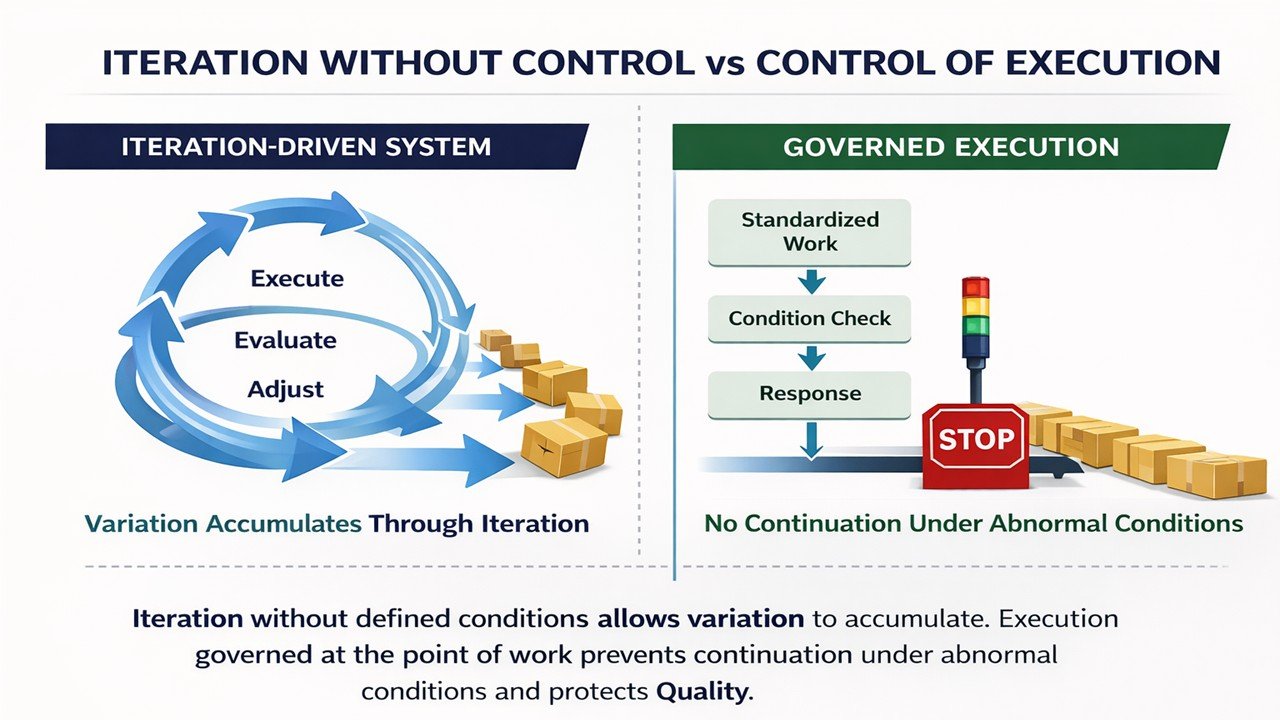
Why Agile Iteration Fails Without Governance
Rapid iteration assumes that learning occurs through repeated cycles of execution and adjustment. Without defined conditions and enforced control, each cycle introduces variation rather than reducing it. Instead of converging toward stability, the system moves away from it.
In this state, operators compensate for instability to maintain output. Local adjustments are applied to problems that originate in the system, and those adjustments vary across individuals and cycles. Feedback is generated from a system already operating under variation, which means the information used for learning no longer represents a controlled baseline. It reflects the accumulated effects of prior instability, incorporates them into subsequent decisions, and progressively erodes the system’s reference point for normal execution.
Under these conditions, iteration becomes a loop of compensation rather than improvement. Each cycle incorporates the variation introduced in previous cycles and attempts to correct it without addressing the conditions that produced it. The system does not converge toward a stable state. It amplifies its own deviation as each cycle builds on an increasingly unstable foundation.
Increasing the speed of iteration accelerates this effect. More cycles introduce variation more frequently, reduce the time available to detect and respond to deviation, and reinforce the use of unstable feedback. The system becomes progressively more sensitive to variation while simultaneously losing the ability to distinguish signal from noise. As instability increases, corrective actions become less effective because they are applied to conditions that are no longer stable.
This outcome is not a failure of Agile methods themselves. It is the direct result of applying iteration in the absence of governed execution.
Lean (post-1988), Agile, and the Loss of System Authority
Lean (post-1988) removed the governing conditions of the Toyota Production System in order to make its practices portable across organizations. Agile Manufacturing builds on that portability by increasing responsiveness and speed through iterative execution. Neither restores the enforcement required to control how work is performed.
When the Toyota Production System is treated as a conceptual foundation rather than a governing system, its authority is displaced. Its elements remain in use, but they are no longer required to operate together as a system that constrains behavior. Standardized Work becomes a reference rather than a condition. Jidoka becomes a concept rather than an enforced interruption. Leadership response becomes situational rather than structurally required.
In this state, performance is no longer governed by system design. Execution depends on interpretation, individual effort, and local decision-making. Work continues under variation, and problems are addressed after they occur rather than prevented through enforced conditions. The language of the system remains visible, but its constraints are no longer active.
This loss of authority changes how the system behaves. Variation is not constrained at the point of execution. It is introduced, carried forward, and managed through subsequent activity. Improvement becomes reactive, and stability becomes dependent on continuous intervention rather than built-in control. System authority is displaced, and execution becomes dependent on interpretation rather than enforced constraint.
This is why organizations can implement Lean and Agile extensively while continuing to experience instability, variation, and Quality issues. The system is no longer governing behavior.
Reestablishing the Boundary
The distinction is not between Lean and Agile. It is between governed and ungoverned systems.
A governed system defines the normal conditions of execution and enforces them. It interrupts work when those conditions are violated, requires a response tied to that interruption, and prevents continuation under abnormal conditions. Control is applied during execution, and behavior is constrained by system design rather than interpretation. Variation is prevented at the point of work.
An ungoverned system does not define or enforce these conditions. It relies on improvement activity, iteration, and feedback while allowing execution to proceed under variation. Checkpoints are used to evaluate outcomes after work has been completed, and intervention occurs only after defects have already been introduced into the system. Variation is managed after it occurs rather than prevented at its source.
This distinction is structural. In a governed system, variation is constrained by design and eliminated at the point of occurrence. In an ungoverned system, variation enters during execution, propagates through the system, and is addressed through subsequent activity. The difference is not in intent or philosophy, but in whether execution is controlled.
The Toyota Production System operates as a governed system. Lean (post-1988) and Agile Manufacturing, as they are commonly applied, operate without these governing conditions.
Closing Condition
Quality is not created by speed, flexibility, or iteration. It is created when the conditions of execution are defined and enforced.
Lean (post-1988) replaced those conditions with improvement activity. Agile Manufacturing accelerates that activity through iteration and responsiveness. Neither restores the control required to govern execution at the point of work.
Without defined conditions and enforced response, variation enters during execution and moves through the system. Quality becomes dependent on detection and correction rather than ensured by design.
A system that does not enforce its conditions cannot prevent its own failure. It can only detect and respond to it after the fact.
Without enforced conditions, execution cannot be controlled, and Quality cannot be guaranteed.
The Toyota Production System prevents this by governing how work is performed and enforcing the conditions under which execution is allowed to proceed.