TPS as the Governing Architecture for AI and Humanoid Execution
AI and humanoid robots do not introduce a new production paradigm. They expose whether execution is governed. Most organizations approach AI as a technology problem, assuming increased computational capability will resolve operational limitations. The constraint is not computational capability. The constraint is whether work is defined, controlled, and executed under conditions that can be enforced. When these conditions are absent, automation does not reduce variation. It amplifies it.
AI and humanoid robots can only operate effectively under controlled execution conditions defined by the Toyota Production System. The Toyota Production System AI framework governs those conditions and establishes the requirements for stable automation.
The Toyota Production System resolves this requirement at the level of execution. TPS defines the conditions under which work is allowed to proceed and enforces those conditions in real time. Standardized Work establishes method, sequence, timing, and expected outcome. Jidoka interrupts execution when those conditions are violated. Responsibility for Quality is held at the system level rather than deferred to inspection or individual judgment. Execution proceeds only under defined conditions, with immediate detection of abnormality and required response before continuation.
AI and humanoid robots operate within these same constraints. They require defined work, real-time detection of abnormality, and explicit conditions for response. When these are absent, automated systems execute errors at scale and propagate instability. The separation often made between TPS and AI is artificial. Both depend on the same requirement: execution must be defined and controlled at the point of use.
The Toyota Production System was not designed as an automation framework in the modern sense. It was developed to resolve conditions where variation, instability, and lack of control prevented consistent Quality. The resulting structure separates human judgment from machine activity, exposes abnormality as it occurs, and prevents continuation under uncontrolled conditions.
This paper establishes why TPS is the only production and management architecture already structured to govern execution in environments that include AI systems and humanoid robotics. It defines the conditions required for predictable operation: work executed without interpretation, abnormality made visible at the moment it occurs, and continuation prevented until conditions are restored.
Organizations that attempt to integrate AI without these conditions introduce automation into systems that are not governed. Complexity increases, detection of failure is delayed, and performance becomes dependent on monitoring and intervention rather than control. Execution shifts from defined conditions to reactive management.
This paper defines the TPS elements that enable controlled execution in Mixed-Model Human–Humanoid environments, where human and autonomous execution operate under shared system conditions. Standardized Work, Jidoka, and system-level responsibility for Quality establish the structure required for integration. Systems that rely on tools, improvement programs, or interpretation do not establish these conditions and cannot sustain stable operation under automation.
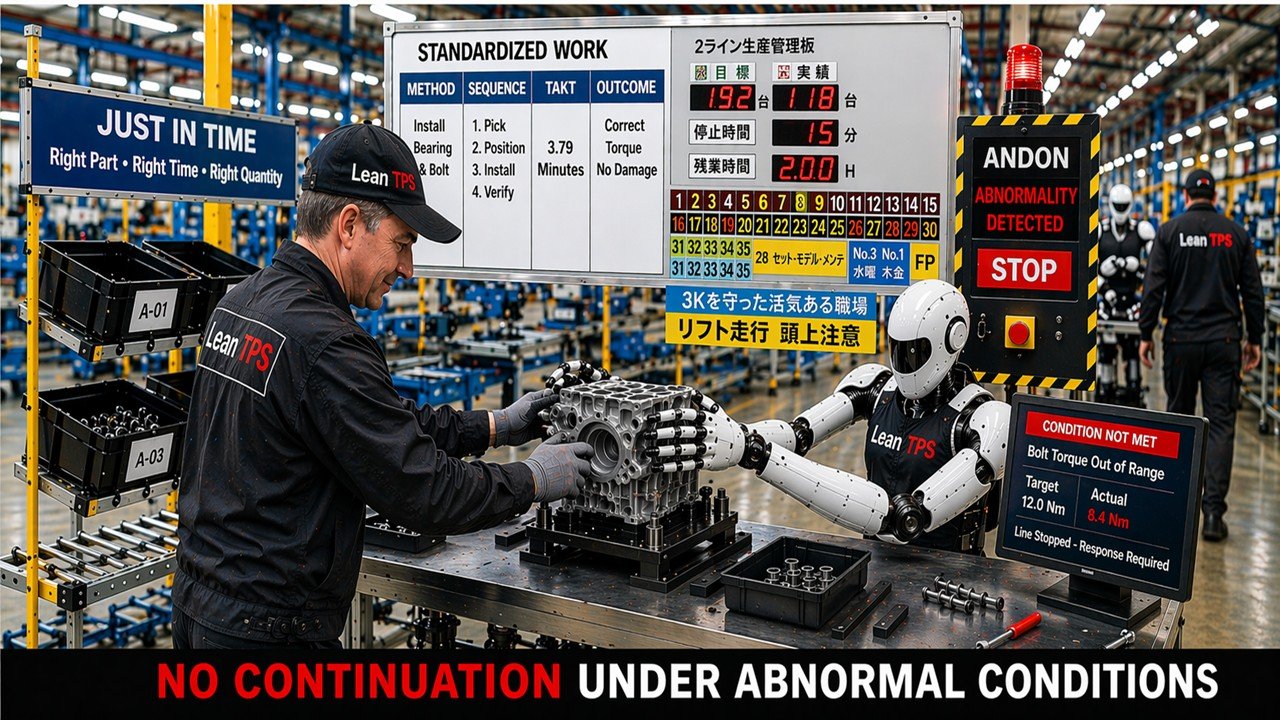
Jidoka: The Control Architecture for Intelligent Autonomation
Jidoka governs execution by defining the conditions under which work is allowed to proceed and enforcing interruption when those conditions are violated. It establishes control at the point of use by exposing abnormality, stopping execution, and requiring response before continuation. The objective is not detection. The objective is to prevent continuation under uncontrolled conditions and protect Quality at the source.
Execution proceeds only when defined conditions are met. When deviation occurs, work does not continue. The system interrupts execution immediately so the condition can be observed and corrected. This prevents defects, delays, and variation from propagating downstream. Control is established by making abnormality visible and enforcing response at the moment it occurs.
Jidoka defines a clear sequence of response. Abnormality is detected at the point of execution. A signal is generated to indicate the condition. Execution is stopped, and responsibility is assigned to respond. The condition is corrected, and confirmation is required before work resumes. This sequence ensures that problems are addressed when they occur and that execution remains aligned to defined conditions.
Human and humanoid robot execution operate within this same control structure. Both execute defined work under Standardized Work conditions. When abnormality occurs, execution is interrupted regardless of whether the work is performed by a human or a humanoid robot. Humans respond to the condition, restore defined execution requirements, and confirm that the condition has been corrected before continuation. Control is maintained at the system level rather than within individual operators or machines.
Jidoka separates execution from judgment. Work is performed according to defined conditions, and response is required when those conditions are not met. Individuals do not decide whether to continue. The system defines when continuation is allowed. This removes variation in response and ensures that execution is governed consistently.
Visual management and Andon support Jidoka by making conditions visible and enabling immediate signaling. However, visibility alone does not create control. Control is established only when execution is interrupted and response is required before continuation. Without enforced interruption, abnormality remains informational rather than actionable.
AI systems and humanoid robots depend on this structure. Execution must occur within defined conditions, abnormality must be detected at the moment it occurs, and continuation must be prevented until the condition is restored. When this structure is absent, automation executes without control and instability increases. Errors are propagated at speed because no mechanism exists to interrupt execution.
Jidoka provides the control architecture required for intelligent autonomation. It ensures that execution does not proceed under abnormal conditions, that response is immediate and required, and that Quality is protected at the source. This structure allows human and humanoid robot execution to operate within the same governed system, where continuation is controlled, deviation is addressed, and performance is sustained through defined conditions.
Just in Time: The Execution Structure for Controlled Flow
Just in Time governs the timing and sequence of work within the Toyota Production System so execution occurs under defined and repeatable conditions. The objective is not efficiency. The objective is to eliminate instability by controlling when work occurs, in what order it proceeds, and under what conditions it is allowed to continue. Production is aligned to actual demand, and execution follows defined constraints rather than local decision making.
Just in Time establishes a fixed execution rhythm. Takt time defines the required pace of production and determines when work begins, how long it proceeds, and when it must be completed. Processes do not accelerate or decelerate independently. Timing is synchronized across the system, creating consistent cycle conditions. When timing is stable, execution becomes predictable. Automated systems depend on this stability because variation in timing disrupts synchronization and introduces error.
Just in Time defines sequence at the point of execution. Work is performed in a fixed order, and materials arrive at the correct point of use in the required orientation and sequence. Connected processes and FIFO flow ensure that each step receives what is required to proceed without delay. Material arrival is governed by defined conditions rather than availability or convenience.
Just in Time creates predictability by aligning production to actual consumption and removing overproduction. Workload is stabilized, and variation is reduced at the source. Execution follows a consistent pattern where inputs are controlled and outputs remain stable.
Just in Time removes ambiguity from execution by defining quantity, location, timing, and replenishment signals explicitly. Work proceeds based on these conditions rather than individual interpretation. When interpretation is removed, execution becomes consistent across operators and processes, allowing human and humanoid robot activity to operate within the same system without conflict.
Just in Time establishes the conditions under which execution proceeds. Start conditions are defined, cycle time is fixed to takt, and material sequence is controlled. Deviation becomes visible when these conditions are not met. Jidoka enforces interruption at that point, ensuring that execution does not continue under unstable conditions. Just in Time defines when and in what order work occurs. Jidoka governs whether it is allowed to continue.
This structure existed before modern robotics and remains unchanged in its requirements. AI systems and humanoid robots depend on defined timing, fixed sequence, stable inputs, and explicit execution conditions. When these are absent, automation operates without control and instability increases.
Just in Time provides the execution structure required for controlled operation by defining rhythm and sequence as enforceable conditions. It creates the stability necessary for human and humanoid robot work to proceed predictably with protected Quality.
Flow: The Architecture That Makes Robotics and AI Possible
Flow governs how work progresses through the system under controlled conditions. It is not movement. It is the ordered progression of work where each step follows the previous step without interruption, accumulation, or rework. The objective is not speed. The objective is to expose abnormality and prevent instability, so execution remains aligned to defined conditions.
The Toyota Production System established flow to eliminate stagnation, overproduction, and hidden variation by designing continuous progression between processes. Work moves from one step to the next within a defined sequence and timing structure, preventing accumulation that would conceal deviation. When work progresses continuously, any disruption becomes immediately visible.
Flow connects processes into a single system of execution. Each step is linked so output from one process becomes the defined input to the next. Waiting, rework, and uncontrolled transitions are removed. Work-in-process is limited, and progression follows a predictable path. Automated systems depend on this continuity because disconnection introduces variability that cannot be corrected at the point of execution.
Flow prevents stagnation and overproduction by restricting production to required conditions. Excess production creates inventory that hides defects, disrupts sequencing, and introduces uneven workload. Flow removes this condition by ensuring that only the required work progresses through the system.
Flow makes abnormality visible at the moment it occurs. Deviation from defined sequence or progression interrupts the expected path of work. Delays, missing components, incorrect order, and excess motion are exposed immediately because there is no buffer to absorb them. This visibility enables Jidoka to function since interruption depends on detection. Without exposure, execution continues under abnormal conditions and control is lost.
Flow defines the physical and logical progression of work. Path, direction, order, spacing, and quantity are specified. Movement is not determined by individual judgment. Each step occurs within defined boundaries that support repeatable execution. This level of definition is required for both human and humanoid robot activity. When progression is undefined, variation is introduced and execution becomes unstable.
Flow establishes predictable material and information movement as part of execution. Materials arrive in sequence, in the required quantity, at the correct location. Information signals are aligned with execution timing and delivered when required. This removes uncertainty and ensures that each step receives what is needed to proceed without delay. Predictable input creates predictable execution.
Flow establishes the structure under which execution is maintained. Progression is continuous, work-in-process is limited, transitions are controlled, and abnormality is visible. Just in Time defines when and in what order work occurs. Jidoka governs whether execution is allowed to continue. Flow integrates these elements into a continuous system where work progresses under controlled conditions.
This structure existed before robotics and AI and remains unchanged in its requirements. AI systems and humanoid robots depend on defined progression, stable conditions, and immediate visibility of abnormality. When these conditions are absent, automation operates without control and instability increases.
Flow provides the execution architecture required for stable, predictable, and controlled integration of human and humanoid systems.
Standardized Work: The Method That Governs Human and Humanoid Execution
Standardized Work governs execution within the Toyota Production System by defining the method, sequence, timing, and expected outcome under which work is allowed to proceed. The objective is not documentation. The objective is to establish conditions that can be executed without variation and interrupted when those conditions are not met. Execution is controlled through defined standards rather than individual interpretation.
This structure was developed to stabilize human work before automation existed. It established repeatable motion, exposed abnormality at the point of occurrence, and aligned execution to takt. When work is not defined at this level, variation is introduced at the point of use, abnormality remains hidden, and autonomation operates without control.
Standardized Work defines sequence as a condition of execution. Each task is specified in the correct order using the best-known method. Steps and expected outcomes are defined so execution proceeds consistently. When sequence is controlled, deviation becomes immediately visible because work no longer follows the defined condition. AI systems and humanoid robots depend on this consistency because they cannot interpret variation in human behavior or compensate for inconsistent execution.
Standardized Work defines timing through alignment to takt. Manual work, machine interaction, walking, and waiting are integrated into a single cycle. The relationship between human activity and humanoid robot operation is established within this timing structure. Deviation from this timing reveals instability and disrupts synchronization between processes. AI systems and humanoid robots depend on this temporal stability to operate without conflict.
Standardized Work defines motion by establishing the physical path of execution. Movement, positioning, and interaction with tools and materials are specified. Unnecessary motion is removed, and the work area is structured to support repeatable execution. This creates predictable human movement that can operate safely alongside humanoid robots.
Standardized Work establishes the conditions that distinguish normal from abnormal execution. Deviation from defined sequence, timing, or motion is observed directly against the standard. This enables immediate detection and supports interruption through Jidoka. Without defined conditions, abnormality cannot be identified and execution continues without control.
AI systems and humanoid robots operate within fixed boundaries and require defined sequence, stable timing, and predictable motion. When these conditions are not present, errors are produced and propagated across the system. Standardized Work prevents this condition by defining how work must be performed and by exposing deviation at the moment it occurs.
This structure separates human and humanoid robot responsibility within execution. Humanoid robots perform defined work within established conditions. Humans restore those conditions when they are not met and improve the system based on observed deviation. Abnormality is visible to both, and continuation is governed by adherence to defined standards. This creates compatibility between human capability and machine execution.
Standardized Work is the engineering of stability. It establishes repeatable human behavior, predictable interaction with humanoid robots, and controlled execution aligned to takt. Autonomation does not create this stability. Stability must be established first. Standardized Work provides the condition required for effective integration of AI systems and humanoid robots and ensures that execution remains controlled as technology is introduced.
Andon: The Real-Time System That Makes Abnormality Visible
Andon governs execution in real time by defining normal conditions, exposing deviation at the moment it occurs, and requiring response before work is allowed to continue. The objective is not communication. The objective is control. Execution proceeds only when conditions are visible, verified, and maintained within defined limits.
The system was established to prevent small deviations from becoming system failures by linking condition directly to response. Work is evaluated continuously against a defined state, and any departure from that state is made immediately visible.
Andon establishes the planned condition as the reference for execution. Expected output, timing, and progression are defined and made visible so the system has a clear standard for comparison. Without this reference, abnormality cannot be identified.
The actual condition is made visible in real time. Output and progress are continuously updated so alignment or deviation from the defined condition is immediately observable. Operators and leaders share the same view of execution, eliminating reliance on delayed reporting or interpretation.
Deviation from the defined condition is exposed as abnormality. Disruption in cycle time, equipment failure, defects, or interruption to flow triggers visual and audible signals. These signals do not describe the problem. They declare that execution has moved outside defined conditions.
Andon requires response as a condition of control. A signal without response does not change execution. Leaders must respond immediately, confirm the actual condition, support correction, and restore the defined state. Execution does not continue under unresolved abnormal conditions. This requirement prevents deviation from propagating through the system.
This structure maintains controlled execution by linking defined conditions, real-time visibility, and required response. Just in Time defines when and in what order work occurs. Standardized Work defines how work is performed. Andon ensures that deviation from those conditions is visible and acted upon immediately.
AI systems and humanoid robots depend on the same structure. Execution boundaries must be defined, deviation must be detected in real time, and escalation must occur without delay. Automated systems do not interpret ambiguous conditions or compensate for hidden instability. When deviation is not exposed and addressed, execution continues under abnormal conditions and instability increases.
Andon establishes the response sequence that governs execution. Abnormality is detected and signaled, a leader responds at the point of occurrence, the condition is confirmed, flow is restored safely, and the cause is addressed to prevent recurrence. This sequence ensures that abnormality is corrected and removed from the system.
Andon functions as the operational control layer of the Toyota Production System. It defines normal conditions, exposes abnormality, and enforces response before continuation. It connects human action and humanoid robot execution through visible, real-time signals that govern behavior at the point of use. It is not a display system. It is the mechanism that enables stable, predictable, and controlled operation in environments where humans and humanoid robots work together.
Pull Systems and Kanban: The Control Mechanism for Inventory, Timing, and Flow
Pull systems govern production by linking output directly to consumption. Kanban enforces this control by authorizing production and movement only when defined conditions are met. The objective is not efficiency. The objective is to prevent overproduction, limit work-in-process, and maintain controlled flow aligned to actual demand. Execution proceeds only when consumption creates a verified requirement.
The Fill-Up Production System used within Toyota demonstrates this structure as a physical control system. Production is not driven by forecast. It is triggered by actual use. A component consumed at assembly generates a Kanban signal that authorizes replenishment from upstream processes. Without this signal, production does not proceed and material does not move.
Kanban defines work-in-process as a controlled condition. The number of cards in circulation establishes the maximum inventory allowed within the system. When all cards are active, no additional production is authorized. This creates a fixed upper limit for work-in-process that cannot be exceeded. Inventory is controlled through system design rather than administrative decision, preventing overproduction by restricting the ability to produce beyond defined conditions.
Timing within the pull system is derived from takt. Replenishment intervals are based on consumption rate and aligned to the required pace of production. Movement, loading, and transport operate within this timing structure, ensuring that material handling supports execution rather than reacting to shortages or delays.
Material handling functions as part of the execution system. Routes, load sizes, and travel paths are defined by timing and demand. Movement follows a repeatable pattern aligned to consumption cycles, ensuring that materials arrive in the correct quantity at the required time. This removes variability and prevents disruption caused by reactive movement.
Processes are connected through shared conditions. Consumption triggers replenishment, replenishment authorizes production, and movement links each process in sequence. This eliminates independent decision making and stabilizes execution across the system.
Abnormality becomes visible through disruption of these conditions. Delays in movement, missing signals, or imbalance between consumption and replenishment expose deviation immediately. The system does not absorb these conditions through excess inventory. It reveals them so response can be initiated before instability spreads.
Inventory becomes an outcome of system design rather than a managed variable. Work-in-process is determined by Kanban quantity, replenishment timing, and physical constraints.
Pull systems and Kanban establish controlled execution by enforcing the conditions under which work proceeds. Production is authorized by consumption, work-in-process is physically limited, timing is aligned to takt, and movement is synchronized across processes. These conditions maintain stability and ensure that abnormality is exposed when it occurs.
AI systems and humanoid robots depend on the same structure. They require predictable input, defined inventory limits, and stable timing. When production is driven by forecast or reaction, variability increases and control is lost. Automated systems cannot compensate for this instability.
Pull systems remove this variability by defining when and how work proceeds. Kanban enforces these conditions and ensures that execution remains aligned to actual demand. The Fill-Up Production System demonstrates that Just in Time is a physical control system governing production, material movement, and consumption within a single, stable structure that protects Quality.
Level Loading and Heijunka: The Planning Controls for Stable Execution
Level Loading and Heijunka govern production at the planning level of the Toyota Production System by defining the quantity, mix, and sequence of work before execution begins. The objective is not output optimization. The objective is removal of variation at the source, so execution proceeds under stable and repeatable conditions. When variation is absorbed in planning, it does not enter the system where it cannot be controlled.
Instability introduced through planning propagates directly into execution. Fluctuation in demand, uneven workload distribution, and inconsistent sequencing create conditions where timing shifts, work content varies, and flow becomes unpredictable. These conditions cannot be corrected at the operator or machine level because they originate outside execution. Control requires that variation be removed before work is released into the system.
Level Loading establishes a consistent production rhythm by distributing output evenly across defined time intervals. Workload is stabilized so each period operates under the same demand condition. Material replenishment, manpower allocation, and support functions align to this rhythm. Demand variation is absorbed through planning rather than passed into execution, maintaining stable cycle conditions and consistent takt.
Heijunka defines the sequence and mix of production so variation in demand is leveled into a predictable pattern. Product mix is distributed across small, repeatable intervals, and sequence is defined and repeated. This reduces the impact of changeover and stabilizes material presentation. Each unit arrives in a known order, allowing upstream and downstream processes to remain aligned.
Together, Level Loading and Heijunka prevent instability from entering the system. Production pace remains fixed, sequence is controlled, workload is balanced, and material presentation is consistent. Without this structure, takt fluctuates, sequence varies, and material flow becomes unstable. Execution shifts outside controlled conditions.
AI systems and humanoid robots depend on this stability. They require consistent inputs, stable timing, and predictable sequence to operate without error. Variation introduced at the planning level disrupts synchronization between human and humanoid robot activity.
Level Loading and Heijunka remove variation before execution and sustain stable conditions over time. Jidoka enforces interruption when conditions are violated. Just in Time governs timing and sequence. Standardized Work defines execution. Level Loading and Heijunka ensure that these conditions remain stable as demand changes.
These methods do not support autonomation as an added capability. They establish the planning conditions required for autonomation to operate within control. When properly applied, they create a stable environment where human and humanoid robot work proceed in alignment and Quality is protected through defined and consistent conditions.
Takt Time: Designing the Rhythm That Humans and Humanoid Robots Must Share
Takt time governs the pace of execution within the Toyota Production System by defining the interval at which work must be completed to meet customer demand. The objective is not measurement of performance. The objective is to establish a fixed rhythm that aligns all processes to a common pace, so execution remains stable and controlled.
Takt time is calculated from available operating time and customer demand, establishing the required output interval for the final process. Every upstream process aligns to this interval, creating a system governed by a single timing relationship. Work begins and completes within a defined cycle, and processes do not accelerate or decelerate independently. Execution proceeds at a consistent rate that can be sustained across the system.
This timing structure creates controlled execution by defining clear start and finish points, aligning work content to the required interval, and synchronizing processes across the system. When timing is consistent, flow is maintained and interaction between processes becomes predictable. Automated systems depend on this condition because variation in pacing disrupts synchronization and introduces instability.
Takt time establishes alignment across processes by defining the rate at which each step must operate relative to final demand. When multiple units are required within a single interval, the required pace for each process is calculated proportionally. Overproduction is prevented, waiting is reduced, and inventory accumulation is limited because each process operates within the same timing constraint.
Human and humanoid robot interaction is stabilized through this alignment. Operators perform work within a consistent cycle, and movement, sequence, and humanoid robot interaction become repeatable. AI systems and humanoid robots execute within the same interval, creating synchronization between human and humanoid robot activity. Interaction points are predictable, and execution proceeds without conflict.
Takt time exposes abnormality by making deviation from the defined interval immediately visible. When a process exceeds the required time, flow is disrupted. When output occurs ahead of the interval, accumulation occurs. These conditions reveal instability at the moment it is introduced. Jidoka enforces interruption when conditions are violated, and Andon signals the deviation so response can occur immediately. Takt time provides the reference condition that makes deviation observable.
AI systems and humanoid robots operate within fixed timing boundaries and execute programmed cycles based on defined intervals. When processes do not align to takt, gaps, waiting, or overload occur.
Takt time establishes the rhythm required for stable execution by synchronizing all processes to a common interval. When this condition is maintained, flow remains predictable and interaction between human and humanoid robot work remains controlled. When it is not, variation enters the system and stability is lost.
Takt time is not a planning tool. It is a control condition that governs execution. It defines the pace at which work is allowed to proceed and ensures that all processes operate within the same timing structure, enabling stable and synchronized human and humanoid robot execution with protected Quality.
Multi-Process Work: How Toyota Designs Human Motion for Stability, Quality, and Robotics
Multi-process work defines how a single operator executes work across multiple stations under controlled conditions. It extends Standardized Work by governing movement, timing, sequence, and interaction with machines within a single cycle. The objective is not utilization. The objective is to establish stable, repeatable human motion that remains synchronized with flow and aligned to defined conditions of execution.
When one operator supports multiple processes, variation cannot be absorbed. Any deviation in timing, sequence, or movement immediately disrupts downstream activity. This condition requires precision in system design because instability is exposed at the point it is introduced. Execution must therefore be structured so that movement, timing, and sequence remain defined and repeatable across all supported stations.
Multi-process work defines the interface between human and humanoid robot activity. Humanoid robots operate within defined time windows, and the operator loads, unloads, confirms, and transitions between stations within that same cycle. Boundaries between manual and autonomation-based execution are specified so interaction occurs without overlap or conflict. This creates a stable interface where both operate within defined conditions.
Sequence is governed as a condition of execution. Work elements are defined in exact order, and each task occurs at a specific point within the cycle. The relationship between stations is fixed, and progression is synchronized with flow. Deviation from sequence becomes immediately visible because it disrupts the expected pattern of execution.
Timing is aligned to takt and integrated across all work elements. Manual work, humanoid robot interaction, and walking time are combined within a single cycle that must be completed within the defined interval. Any variation creates imbalance across stations and interrupts flow. This alignment ensures that human activity remains synchronized with humanoid robot cycles.
Abnormality becomes visible when deviation occurs in movement, sequence, or timing. A delay at one station disrupts the next, and variation in motion creates imbalance within the cycle. These conditions are observable at the moment they occur and signal that execution has moved outside defined limits.
Multi-process work establishes repeatable human behavior across multiple stations. Movement is defined, sequence is fixed, cycle time is controlled, and interaction points are specified. Execution remains consistent and aligned to system requirements rather than dependent on individual interpretation.
AI systems and humanoid robots depend on this stability. They require predictable human movement, consistent timing, and defined interaction points to operate within controlled conditions. When human motion varies, synchronization is lost. When sequence changes or timing drifts, automated execution becomes unstable.
Multi-process work removes this variation by engineering human activity within defined limits. Movement is controlled, timing is aligned to takt, sequence is fixed, and humanoid robot interaction is specified. This creates compatibility between human capability and humanoid robot execution.
Multi-process work is not documentation. It is system design. It integrates flow, timing, motion, and sequence into a single structure that governs execution across multiple stations. This structure existed before robotics and remains unchanged in its requirements. Autonomation is applied only after execution conditions are stabilized. Multi-process work provides the condition required for safe, predictable, and controlled integration of AI systems and humanoid robots.
Building Control Through Information and Flow
Information flow governs how decisions are made and how execution proceeds within the system. It must be defined, timed, and directly connected to the conditions of work. The objective is not communication. The objective is to ensure that decisions occur with the correct information, at the correct time, so execution remains controlled and aligned to defined conditions.
When information is unclear, delayed, or inconsistent, execution becomes unstable. Work waits for direction, decisions are made without full conditions, and rework loops form. These outcomes result from an information system that does not govern execution.
Information flow defines system behavior because every action depends on it. Instructions, confirmations, approvals, and signals determine when work starts, how it proceeds, and when it is complete. If this flow is not structured, execution relies on interpretation. Timing becomes inconsistent and control is lost because conditions are not established in advance of execution.
Information flow must be designed as part of the system. Required inputs for each step are specified, decision points are defined, and pathways for information movement are established. Timing is aligned to execution so that each process receives what it needs when required.
Uncontrolled information introduces delay and disrupts flow. Approvals, clarifications, and exceptions create waiting, and work accumulates in queues. When decision pathways are unclear, execution cannot proceed consistently because conditions are not established in time.
Designing information flow reduces unnecessary decision points. When standards define normal conditions, decisions occur within the process rather than being escalated. This reduces variation, shortens lead time, and strengthens control by ensuring execution is based on defined conditions.
Visualization of information pathways exposes instability. Mapping how information moves through the system reveals redundant checks, unclear responsibilities, and unnecessary loops. When these conditions are visible, they can be removed or simplified, allowing execution to proceed without interruption.
Information flow and material flow operate as a single system. Material movement depends on the timing and accuracy of information signals. When information is delayed or incomplete, material flow is disrupted and execution becomes unstable. Stable operation requires both flows to be aligned to the same conditions.
Information flow establishes controlled execution by defining inputs, aligning timing, clarifying decision pathways, and assigning responsibility. Abnormality becomes visible through delay, inconsistency, or missing information, enabling response before instability spreads.
Leadership governs information flow by defining required inputs, establishing decision rules, and removing unnecessary approvals. This ensures that execution proceeds without ambiguity and that information supports control rather than creating delay.
AI systems and humanoid robots depend on the same structure. They require defined inputs, clear signals, and consistent timing. When information is incomplete or delayed, errors are introduced before execution begins and are propagated without correction.
Engineering information flow prevents this condition by removing uncertainty, controlling decision timing, and ensuring that execution proceeds with defined inputs. Information becomes an integral part of the system rather than an external support function.
Control of execution requires that material and information flow are designed and aligned. When both operate under defined conditions, the system achieves stability, predictable timing, and consistent Quality.
Standardized Work Combination Table
The Standardized Work Combination Table governs the relationship between manual work, walking, and machine time within a defined cycle. It establishes whether execution aligns with takt and whether the defined sequence can be performed under stable conditions. The objective is not documentation. The objective is to control timing, sequence, and motion at the point of execution so work proceeds within defined limits.
The table integrates the core elements of Standardized Work into a single time-based structure. Takt defines the required pace, sequence defines the order of execution, and in-process stock supports continuity of flow. By plotting these elements against time, the table reveals whether work can be completed within the required interval and sustained under consistent conditions.
Execution becomes visible through this structure. Manual work, walking, and machine time are separated, measured, and placed within the cycle. The relationship between these elements determines whether the operator can complete the work as defined. Alignment allows execution to proceed without interruption. Misalignment exposes instability at the point it is introduced.
Deviation is revealed through the time relationship. Excess walking extends the cycle and creates delay. Manual work exceeding takt disrupts synchronization. Misalignment between human and humanoid robot time introduces waiting or overlap. These conditions are observed directly when the sequence is mapped against the defined interval.
The table establishes control of timing by requiring that all elements fit within takt. Work that exceeds the interval cannot be sustained without disrupting the system. Work that finishes early introduces imbalance that propagates downstream. The correct condition is alignment between sequence and takt, where each element occurs within a defined window.
This alignment creates synchronized execution. Human activity is coordinated with humanoid robot cycles, movement supports the defined sequence, and work elements occur within controlled timing boundaries. Execution proceeds as an integrated cycle rather than as independent actions.
The Standardized Work Combination Table exposes imbalance in the distribution of work. Uneven allocation appears as distortion in the time pattern. Inconsistent sequence creates gaps or overlap. Unnecessary motion increases variation and reduces the ability to maintain takt. These conditions are visible without interpretation and provide a direct basis for response.
This visibility supports control and improvement. Leaders can identify where execution deviates, and operators can confirm whether work follows the defined method. Adjustments are based on observed conditions, and the table becomes the reference for maintaining alignment between sequence, timing, and motion.
The method of creating the table reinforces understanding of the work. Direct observation and manual recording require attention to motion, sequence, and timing. This develops the ability to distinguish value-added work from non-value-added activity and ensures that the defined sequence reflects actual conditions.
The Standardized Work Combination Table defines the conditions required for controlled execution. Timing is established, sequence is fixed, motion is measured, and alignment to takt is confirmed.
AI systems and humanoid robots depend on this level of definition. They require stable cycle time, predictable sequence, and clear interaction between human and humanoid robot activity. When these conditions are not present, automation operates outside controlled boundaries.
The Standardized Work Combination Table provides the time-based structure that ensures execution remains aligned, visible, and controlled, and it establishes the baseline for improvement without introducing instability.
Information and Flow Map for Final Assembly
The Information and Flow Map defines how work, materials, and information move through the assembly system under controlled conditions. It establishes the connection between individual work elements and system-level execution, so all processes operate in alignment with takt, sequence, and defined flow. The objective is not visualization. The objective is to ensure that execution across the system remains stable, visible, and governed by defined conditions.
The map extends Standardized Work to the system level. Each workstation is defined by its sequence, timing, and work content, and these elements are aligned to takt. Stations are connected through continuous flow, creating a single execution structure rather than independent processes. Stability is determined by the relationship between stations. When each operates within the defined interval and sequence, the system functions as a unified whole.
Flow is established as a controlled condition through this integration. Work progresses in a single direction through defined stations, material movement follows the same sequence, and information signals coordinate execution across all processes.
Stability is maintained through defined flow conditions. Sequence is fixed, transitions are controlled, work-in-process is limited, and movement follows a predictable path. These conditions prevent accumulation and reduce variability. When disruption occurs, it becomes immediately visible because the system does not absorb deviation through inventory or delay.
The map defines system capacity and balance by aligning each station to takt. Work content is distributed so all stations operate within the same timing constraint. When a station exceeds or falls below this interval, imbalance becomes visible and disrupts flow. This exposure reveals instability at the system level rather than allowing it to remain isolated.
Work-in-process is controlled by design. Inventory between stations is limited to a defined quantity that supports continuity without masking abnormality. When flow is disrupted, the effect is immediate because excess inventory is not available to absorb variation.
The map connects upstream and downstream dependencies into a single structure. Feeder processes supply material in alignment with takt, and downstream processes consume at a defined rate. Inspection and testing are positioned at points of highest risk, so Quality is confirmed within the flow. Each process operates within the same defined conditions, and deviation is identified where it occurs.
Information flow is integrated with material flow to maintain control of execution. Signals define when work begins, when material is replenished, and when support is required. Timing of information aligns with execution so that work proceeds with the correct inputs at the correct moment. This prevents delay caused by missing or unclear direction.
Leadership placement is defined within the system. Support roles are positioned where variation and risk are highest so leaders can observe conditions directly and respond immediately when abnormality is exposed. Control is maintained within the flow rather than through delayed intervention.
The Information and Flow Map establish system-level control by aligning stations to takt, defining material and information movement, limiting work-in-process, and exposing abnormality across the entire system. When takt, sequence, or work content changes, the map must be updated to maintain alignment. Without this, variation enters the system and control is lost.
AI systems and humanoid robots require this level of system definition. They depend on stable flow, consistent sequencing, and clearly defined interaction across processes. When these relationships are unclear, automation operates within isolated conditions and instability increases.
The Information and Flow Map provides the structure that prevents this condition. It aligns all elements of execution into a single controlled system where human and humanoid robot work proceed with stability, visibility, and defined conditions.
5W2H Condition Definition at the Point of Execution
The Information and Flow structure at the workstation level demonstrates how condition identification and response are embedded within execution. Workstation sequence, material flow, confirmation points, and operator and humanoid robot actions are integrated into a single controlled system so abnormality is detected and addressed at the moment it occurs. The objective is not analysis after the fact. The objective is to clarify the condition immediately and restore control before work continues.
Quality is governed at the source through defined execution conditions. Each workstation operates within a fixed sequence, and material arrives in a specified order and quantity. Confirmation points are built into the work and must be completed as part of execution. This structure prevents defects from moving forward and removes reliance on downstream inspection. When conditions are defined and confirmed within the process, deviation becomes visible at the point it is introduced.
Abnormality is exposed through disruption of the defined pattern. Variation in sequence, timing, or material presentation interrupts expected flow and reveals the condition immediately. Missing components, incorrect model selection, or delivery delays cannot remain hidden because execution cannot proceed without meeting defined conditions. Exposure occurs at the point of use, where response is immediate.
The 5W2H method defines how the condition is clarified before action is taken. Condition is established through structured questioning: who is responsible, what condition has changed, where the deviation occurred, when it occurred within the cycle, why the condition exists, how the work is affected, and how much impact has been created. This structure establishes a complete definition of the condition before action is taken, ensuring that response is based on observed facts rather than interpretation.
Condition clarification is integrated directly into execution. The 5W2H method is applied at the workstation without separating work from the process. This allows the condition to be understood while it is still present and prevents delay between detection and response. Execution and problem clarification remain connected, and control is maintained within the flow.
Material and information flow support detection by operating within defined routes and timing aligned to takt. Sub-assemblies, carts, and components arrive in sequence, and deviation becomes visible through disruption of that sequence. Changes in timing, position, or availability expose imbalance before it propagates.
Observation at the point of work confirms actual conditions. Physical layout, part position, and equipment status provide direct evidence of performance. Data systems support analysis, but verification occurs through direct observation. Decisions are based on the actual condition of the system rather than reported information.
This structure establishes controlled execution across human and humanoid robot activity, structuring material flow, requiring confirmation points, exposing abnormality, and enabling immediate clarification of conditions. Work proceeds only when defined conditions are met, and deviation is addressed without delay.
AI systems and humanoid robots depend on the same conditions. They require defined inputs, consistent material presentation, and stable execution sequences. When these conditions are unclear, automation becomes unstable and errors are introduced. This structure prevents that condition by defining each interaction point and exposing deviation at the moment it occurs.
The 5W2H method supports this environment by producing consistent condition definition and removing ambiguity from response. Human judgment is aligned with defined conditions, allowing clarification to occur within a controlled framework. This creates compatibility between human decision making and humanoid robot execution.
The system integrates flow, control, Quality, and learning into a single structure. Work is defined, material is controlled, abnormality is exposed, conditions are clarified at the source, and standards are improved based on observed conditions. Quality is produced through controlled execution, and both human and humanoid robot systems operate within stable, defined conditions.
Type I Standardized Work: One-Piece Flow Through System-Wide Synchronization
Type I Standardized Work governs execution through one-piece flow by defining a condition where each unit advances only when all stations complete their cycle within takt. The objective is not efficiency. The objective is to eliminate buffers, expose abnormality immediately, and enforce alignment across the entire line so execution remains controlled at every step.
Execution occurs within a mixed-model assembly environment where human and humanoid robot work operate under the same defined conditions. Sequence, timing, and flow are governed at the system level so that each station operates within a common structure regardless of how the work is performed. Advancement is not determined locally. It is governed by system-wide completion of the defined cycle.
One-piece flow establishes controlled movement by requiring that units advance only after completion of the full cycle across all stations. Movement is not triggered by local readiness. It is governed by alignment across the system. This prevents early release, protects downstream conditions, and ensures that each unit progresses only when the entire system is synchronized. Deviation at any point interrupts the progression of work and becomes immediately visible.
The elimination of intermediate inventory defines the structure. Work-in-process is limited to one unit per station, and no buffers exist between processes. Accumulation is removed, and abnormality cannot be absorbed within inventory. When delay occurs, the line is interrupted. Missing components prevent advancement, and incorrect sequence becomes visible at the point of occurrence. The system exposes deviation rather than allowing it to propagate.
Sequence is fixed as a condition of execution. Each work element is defined in order, with method and timing aligned to layout and tool position. Execution follows a repeatable pattern that does not vary between cycles. When sequence is controlled, deviation becomes immediately identifiable as abnormal and requires response.
Quality is built into the flow through confirmation points embedded within the sequence. These points are positioned at locations of highest risk and cannot be bypassed. Each confirmation occurs within the takt-aligned cycle so defects are identified before the unit advances. Correction takes place at the point of occurrence, preventing downstream propagation.
Line speed is governed through alignment of cycle time to takt. Variation between actual and required timing becomes visible within the cycle. Leaders adjust workload, sequence, or method to maintain alignment. This prevents overburden and ensures that execution remains within defined limits.
Type I Standardized Work establishes system control through synchronized movement, fixed sequence, minimal inventory, embedded Quality confirmation, and alignment to takt. Execution remains stable because deviation cannot be hidden or delayed.
AI systems and humanoid robots require these conditions. They depend on fixed sequence, stable timing, and predictable movement. When buffers exist, abnormality is hidden. When sequence varies, execution becomes unstable. When timing shifts, synchronization is lost. Automation does not correct these conditions. It amplifies them.
One-piece flow removes these sources of instability by enforcing execution within defined boundaries. Abnormality is exposed at the moment it occurs, and continuation is governed by system alignment rather than local decision making.
Type I Standardized Work is the most demanding form of flow because it does not absorb variation. Stability must be built into the system. When this condition is achieved, execution proceeds with continuous flow, immediate abnormality exposure, and consistent Quality at the source. This structure provides the foundation required for safe and stable integration of human and humanoid robot work operating under the same controlled conditions.
Type II Standardized Work: Continuous Flow Within Fixed Time and Distance
Type II Standardized Work governs execution in moving assembly environments where products advance continuously and work must be completed within a defined time and distance. The objective is not flexibility. The objective is to maintain stable execution under high-mix conditions by aligning work content, movement, and staffing to takt so variation in product mix does not disrupt control.
Execution occurs within a mixed-model environment where human and humanoid robot work operate under the same defined conditions. Sequence, timing, and flow are governed at the system level so that each unit, regardless of variation in product configuration, is completed within a common execution structure. Advancement is not adjusted locally. It is governed by fixed timing and defined boundaries.
In high-mix production, variation in model content introduces instability when sequence, timing, and workload are not defined. Differences in work content create uneven cycle times, disrupt flow, and generate imbalance between stations. Type II Standardized Work removes this instability by structuring execution so each unit is completed within the same defined conditions regardless of variation.
Execution occurs within a fixed travel window. The product advances at a constant speed, and work is performed within a defined zone. Timing and location are directly linked. Work must be completed within this boundary, and it cannot extend beyond it. When work exceeds the defined window, deviation is immediately visible because the line continues to move without interruption.
Sequence, timing, and motion are integrated into a single controlled structure. Manual work, walking, and humanoid robot interaction are defined within the takt interval. Each element is placed within the cycle to ensure completion within the required time. Movement paths and reach patterns are specified so execution remains consistent despite variation in product configuration.
Manpower is aligned directly to takt through the relationship between required work content and available time. Work content is measured and converted into time per unit, and staffing is determined based on this requirement. This ensures that labour matches workload and prevents both overburden and underutilization. When alignment is maintained, cycle time remains stable and flow proceeds without interruption.
Type II Standardized Work exposes abnormality through disruption of the defined pattern. Delays, extended reach, missing components, or variation in sequence interrupt the expected execution cycle. Because the line continues to move, these deviations cannot be absorbed. They appear immediately as gaps, overlap, or incomplete work. This visibility enables response at the point of occurrence before instability spreads.
Flow is maintained under high-mix conditions by holding pacing and sequence constant. Model variation does not change line speed, and work content is structured so each unit can be completed within the same interval. Execution remains consistent across all variants because the system enforces common timing and sequence conditions.
AI systems and humanoid robots require these same conditions. They depend on fixed timing, predictable motion, and defined interaction points. When sequence varies or workload shifts unpredictably, synchronization is lost and automation becomes unstable. Type II Standardized Work prevents this by enforcing alignment to takt and maintaining consistent execution conditions.
Type II Standardized Work establishes controlled execution in a moving, high-mix environment by defining work within fixed time and distance, maintaining sequence despite variation, aligning manpower to demand, and exposing abnormality immediately. This structure enables stable flow, consistent Quality, and effective integration of human and humanoid robot work operating under the same controlled conditions.
Operator Activity Chart
The Operator Activity Chart governs the visibility of human work within a defined process by separating and displaying manual work, walking, waiting, and humanoid robot interaction against time. The objective is not observation. The objective is to expose imbalance, remove unnecessary motion, and ensure that human activity supports stable execution aligned to takt.
The chart complements Standardized Work by revealing how work is actually performed within the cycle. Work elements are plotted against time so the distribution of effort becomes visible. This structure defines work content, makes movement explicit, and shows how human activity aligns with humanoid robot cycles. Deviation becomes observable because actual execution is displayed against defined conditions.
Imbalance is exposed through the relationship between time and operator activity. Differences in cycle length, overlap in tasks, delays caused by walking, and uneven workload distribution become visible within the chart. These conditions disrupt flow and prevent alignment to takt. When imbalance is visible, workload can be adjusted to restore stability.
Movement is treated as a controlled element of execution. Walking paths, travel distance, and repeated motion are displayed within the cycle, making unnecessary movement visible. When compared to the defined sequence, variation in motion becomes clear. This supports redesign of layout, material presentation, and work elements so movement is reduced, sequence is simplified, and execution becomes repeatable.
The chart defines the interaction between human and humanoid robot activity. Manual work must align with humanoid robot cycles, and this relationship becomes visible when plotted against time. Waiting indicates misalignment, and overlap indicates conflict. The Operator Activity Chart makes the timing relationship between human and humanoid robot activity visible, allowing interaction to be aligned within defined execution windows and ensuring synchronized execution.
Verification is enabled by comparing planned work to actual execution. Differences between the defined condition and observed behavior reveal whether variation is caused by training, layout, or missing system conditions. This provides a factual basis for response and reinforces Standardized Work by confirming sequence, validating timing, and aligning motion.
The Operator Activity Chart establishes the conditions required for stable human activity. Work is balanced, movement is defined, timing is aligned to takt, and interaction with humanoid robots is aligned within defined windows. These conditions ensure that human execution remains consistent and supports overall system stability.
AI systems and humanoid robots depend on this stability. They require predictable human movement, consistent timing, and clearly defined interaction points. When human activity varies, automation cannot synchronize safely and instability increases.
The Operator Activity Chart reduces this variation by making human work visible, exposing imbalance, and enabling correction of motion and timing so execution remains aligned to defined conditions.
The Operator Activity Chart is not a static record. It is a visibility and alignment tool that ensures human activity remains synchronized with system requirements, exposes deviation at the point of occurrence, and supports improvement without introducing instability.
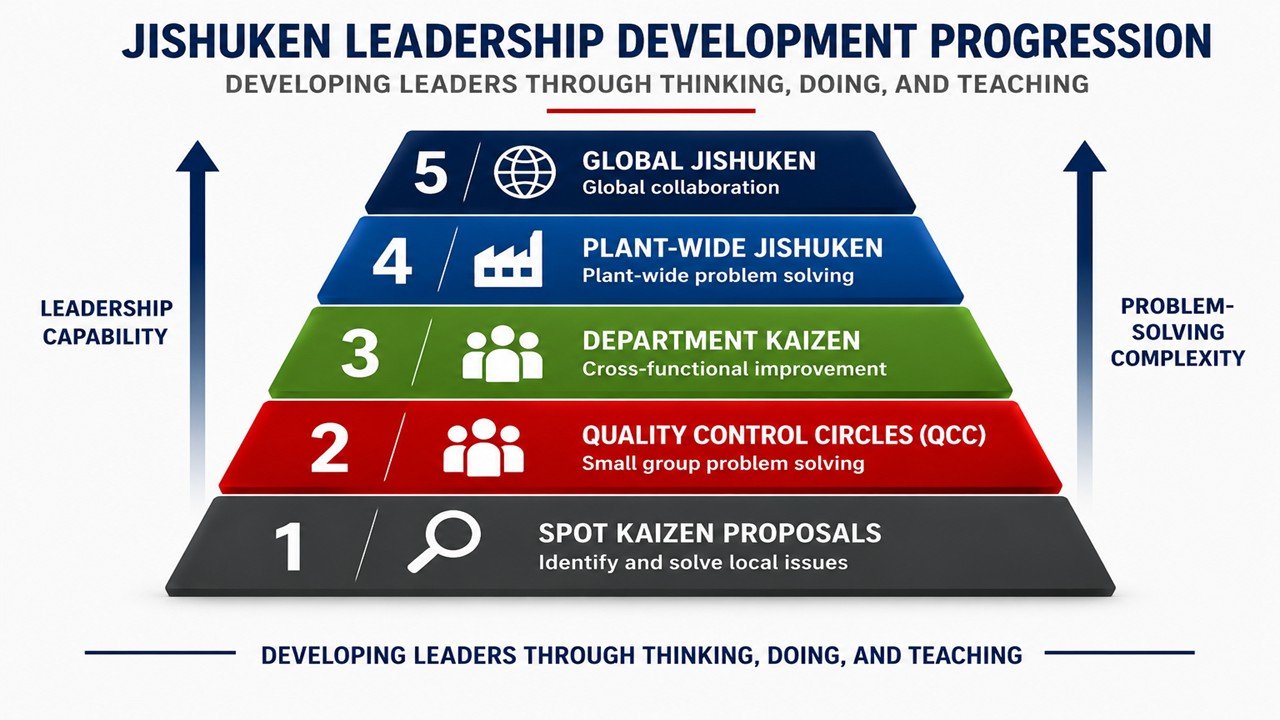
Jishuken: A3 as the Leadership Mechanism for System-Level Condition Control
The A3 governs how leadership defines, aligns, and restores system conditions within the Toyota Production System. It connects daily execution to structured improvement through a defined sequence of observation, analysis, and action. The objective is not reporting. The objective is to ensure that leadership acts on actual conditions and that improvement is executed in a controlled manner that protects flow and Quality.
Within Jishuken, the A3 functions as a leadership discipline. It requires leaders to engage directly at the point of execution to observe work, confirm conditions, and take responsibility for system performance. The A3 is not delegated analysis. It is a structured method for leadership to understand and govern execution based on what is actually occurring within the system.
Condition definition begins with a clear background that establishes why the condition matters and where it exists within the system. This prevents uncontrolled activity and ensures that leadership effort is directed toward conditions that affect flow stability, takt alignment, and Quality performance. Action is initiated only when the condition is defined in relation to system requirements.
The current condition is established through direct observation at the gemba. Work is examined as it occurs, and sequence, timing, material flow, and operating conditions are confirmed across both human and humanoid robot execution. Interaction between human and humanoid activity is observed directly to verify alignment to defined conditions. Data is derived from actual execution rather than reports or interpretation. This creates an accurate reference for decision making and ensures that leadership action is grounded in observed reality.
The gap between current condition and required performance is defined and measured. Indicators such as cycle time, defect occurrence, and workload balance quantify the difference. The purpose is to identify the specific obstacles preventing the system from operating within defined conditions. A clearly defined gap establishes focus and directs investigation.
The target condition defines the requirements for stable execution. Targets are based on system needs and reflect alignment to takt, balanced workload, controlled flow, and defined operating conditions. These targets must be observable and verifiable so that progress can be confirmed through direct observation. Clear targets ensure that leadership action aligns with system requirements.
The A3 structures the sequence of actions required to restore the condition across both human and humanoid robot execution. Actions are integrated with Standardized Work, flow design, material movement, and leadership activity. Each action is linked to the target condition, and responsibility is defined. This ensures that response is controlled, coordinated, and directly connected to system performance.
Execution and verification are governed through defined timing. Implementation is structured, and progress is confirmed through observation at the point of execution. When results do not align with the defined condition, adjustment is required. This maintains the connection between leadership action and actual system behavior.
The A3 establishes controlled improvement by ensuring that leadership defines conditions from actual execution, measures gaps, sets targets based on system requirements, structures response, and verifies results at the point of use. Improvement strengthens system stability rather than introducing variation.
AI systems and humanoid robots require this same discipline. Execution must be defined, conditions must be verified, and response must be governed. When leadership acts based on assumption or delayed analysis, instability is introduced and amplified through automation. Controlled execution cannot be sustained without direct alignment between leadership action and system conditions.
Jishuken develops this capability by requiring leaders to engage directly in system diagnosis, response, and correction. The A3 provides the structure for this engagement. It ensures that conditions are clarified, actions are controlled, and results are sustained without compromising Quality. Leadership responsibility is not to review performance. Leadership responsibility is to govern the conditions under which both human and humanoid execution occur.
System Stability Before Automation
System stability is the required condition before automation can be introduced without creating risk. The purpose of this section is to demonstrate how Jishuken, through the A3 leadership mechanism, confirms whether execution is stable through direct observation, measured conditions, and controlled response. The objective is not preparation for automation. The objective is to establish conditions under which execution can proceed predictably and be sustained within defined limits.
Within Jishuken, leadership establishes the actual condition through direct observation at the point of execution. Cycle time, sequence, manpower allocation, and material flow are measured against defined standards across both human and humanoid robot execution. Interaction between human and humanoid activity is observed directly to verify alignment to defined conditions. This creates a factual representation of how the system operates rather than how it is intended to operate. Conditions are verified against Standardized Work, and variation is identified as it occurs.
Instability is exposed through this process. Variation in sequence, inconsistent material presentation, missing components, and operator overburden disrupt flow and prevent alignment to takt. These conditions do not remain isolated. They propagate across stations and affect downstream processes. Deviation becomes visible as misalignment in cycle time, imbalance in workload, and disruption of material flow.
The target condition defines the requirements for stable execution. Performance must align to takt, sequence must be consistent, material presentation must be standardized, and workload must be balanced. These conditions are observable and measurable, allowing verification through direct observation.
Structured response is required to restore stability by addressing root causes. Work elements are aligned to takt, sequence is corrected, material presentation is standardized, and unnecessary motion is removed. These actions restore execution to defined conditions where cycle time is consistent, sequence is repeatable, and workload is balanced.
Leadership confirms system behavior after response through repeated observation across both human and humanoid robot execution. Execution is verified against the target condition, and stability is demonstrated through consistent performance over time. Results are validated based on actual operation, ensuring that variation has been reduced and conditions are sustained.
System stability is the prerequisite for automation because AI systems and humanoid robots execute within fixed conditions. When variation exists, automation amplifies that variation, increasing the speed and scale of error propagation. Instability becomes both visible and disruptive because execution continues without control.
When stability is established, automation reinforces performance. Execution remains predictable, flow is maintained, and Quality is protected because work proceeds within defined conditions. AI systems and humanoid robots operate within these boundaries and support the system rather than destabilizing it.
Jishuken demonstrates this requirement by requiring leadership to identify and remove instability before automation is introduced. Execution is verified through observation, response is structured and controlled, and conditions are confirmed before technology is applied.
Automation does not create stability. Stability must be established first. The Toyota Production System provides the structure required to achieve this condition, ensuring that execution is controlled before automation is applied and that AI systems and humanoid robots operate within a stable, controlled system.
Preparing Your System for AI and Humanoid Robots
Advanced automation does not create stability. It depends on it. AI systems, autonomous equipment, and humanoid robots require defined conditions of execution where work is specified, timing is stable, flow is controlled, abnormality is visible, and response occurs immediately. These conditions are not created by technology. They are established through the Toyota Production System and enforced at the point of execution.
Each element of TPS governs execution. Jidoka prevents continuation under abnormal conditions. Just in Time defines timing and sequence. Flow establishes continuous progression of work. Standardized Work defines method, timing, and motion. Andon exposes deviation and requires response. Kanban controls production and inventory. Heijunka stabilizes mix and workload. Jishuken develops system capability through structured improvement. Together, these elements create a system where execution proceeds under defined conditions and remains controlled over time.
Automation operates within this structure. Human judgment and machine activity are separated and coordinated so work proceeds only when conditions are met. Deviation is detected and corrected before continuation. Stability is not achieved through monitoring or intervention. It is achieved through control of execution.
System readiness is determined by condition, not technology. Work sequence must be defined and repeatable. Pacing must align to takt without fluctuation. Abnormality must be visible in real time. Problems must be addressed at the point of occurrence. Execution must proceed without reliance on interpretation. These conditions determine whether automation will operate within control.
When these conditions are absent, automation amplifies instability. Variation increases, errors propagate, flow is disrupted, and Quality is degraded. Automated systems execute within the same uncontrolled environment as human operators, but at greater speed and scale.
When these conditions are present, execution remains stable, flow is maintained, and Quality is protected because work proceeds within defined limits. Automation extends the system rather than disrupting it.
Preparation for AI and humanoid robotics begins with system design. Execution must be controlled before technology is introduced, and conditions must be verified through direct observation. Improvement must remove instability at the source, so variation does not enter the system.
The Toyota Production System provides this structure. It defines the conditions under which work is allowed to proceed and enforces response when those conditions are not met. It aligns human and machine activity within a controlled system and sustains stability as complexity increases.
System readiness is achieved by establishing stable execution, defining conditions, controlling continuation, and protecting Quality. When these conditions are present, automation operates as an extension of controlled flow.
Continuity With the Earlier Articles in This Series
This article extends a structural examination developed across LeanTPS.ca: how governance was progressively separated from execution as the Toyota Production System was translated into portable improvement routines.
Three prior analyses directly inform this work.
Why Dashboards and Scorecards Cannot Replace Andon in Lean TPS examined how visibility systems replace stop authority and escalation, shifting Quality from controlled execution to post-event information.
https://leantps.ca/why-dashboards-and-scorecards-cannot-replace-andon-in-lean-tps/
Governance Sequencing in Digital Operations Architecture analyzed how digital systems increase computational precision while leaving authority undefined, producing optimization without boundary control.
https://leantps.ca/governance-sequencing-digital-operations-architecture/
Jishuken: Leadership Governance Through Direct System Engagement demonstrated how Toyota preserves Quality by requiring direct leadership response to abnormality, maintaining the connection between system behavior and responsibility.
https://leantps.ca/jishuken/
Across these analyses, a consistent structural pattern emerges. Governance is replaced by visibility, computation, or routine. Activity increases while control weakens.
Lean TPS restores Quality by governing operating conditions before execution proceeds.